Our prior experience with
Cowbot,
provided us with valuable considerations:
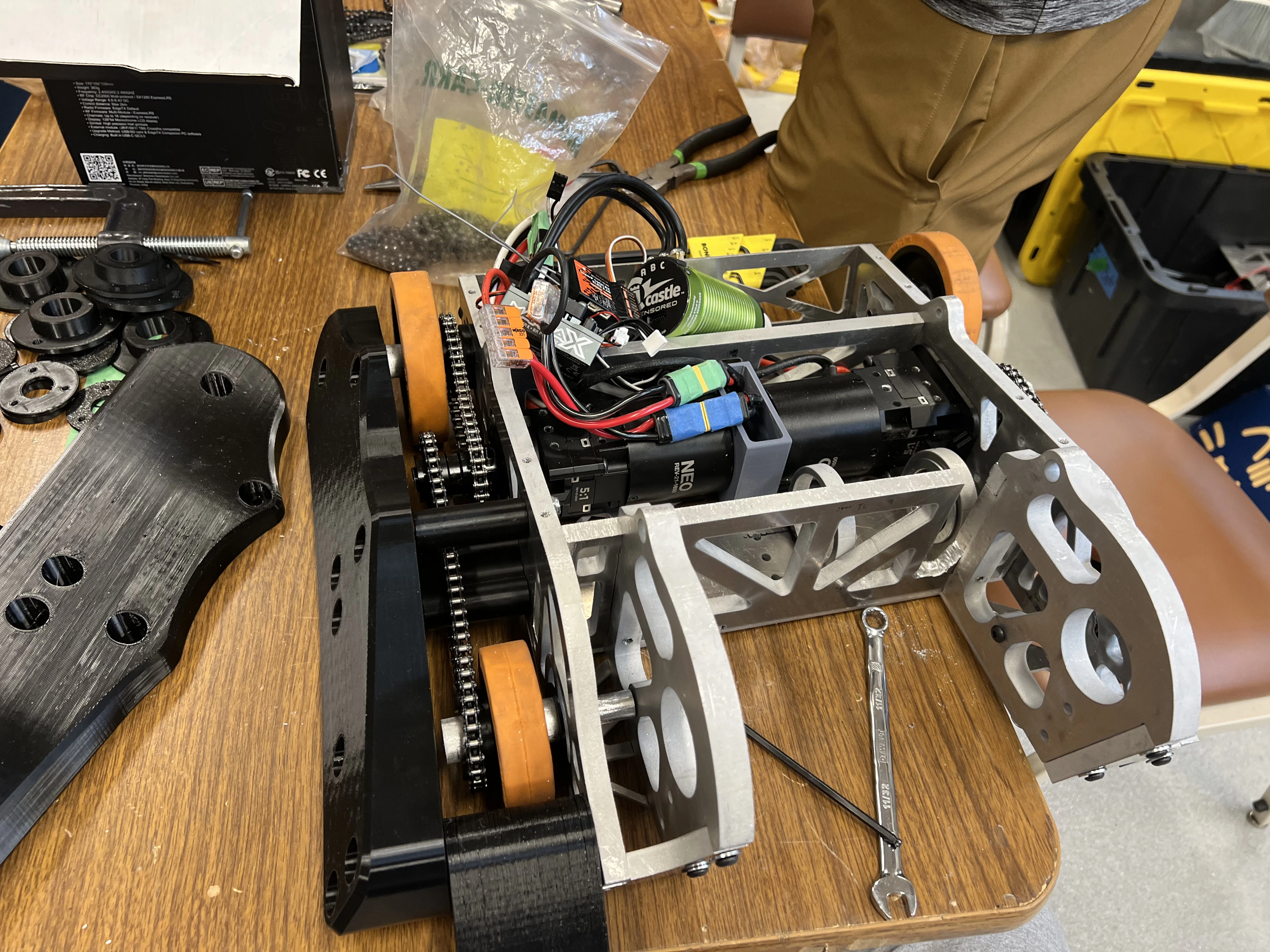
- More space is needed in the interior volume of the robot.
- Ease of access for maintenance and a simplified top access panel.
- Use TPU instead of UHMW to allow for more complex geometries
- Leverage FEA for more analytical-based weight reduction
- Design for assembly (DFA) should be heavily prioritized to allow for uncompromised maintenance
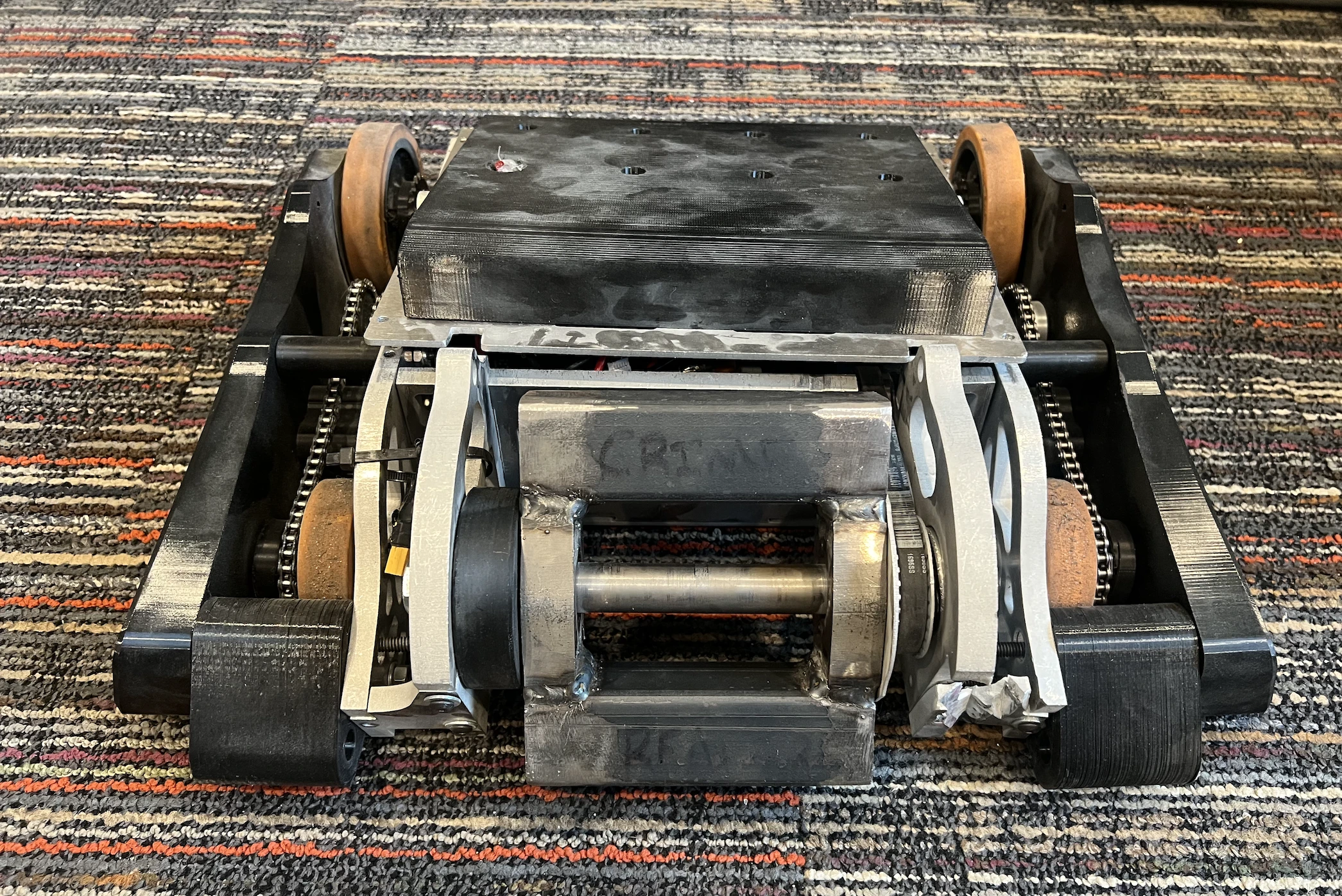
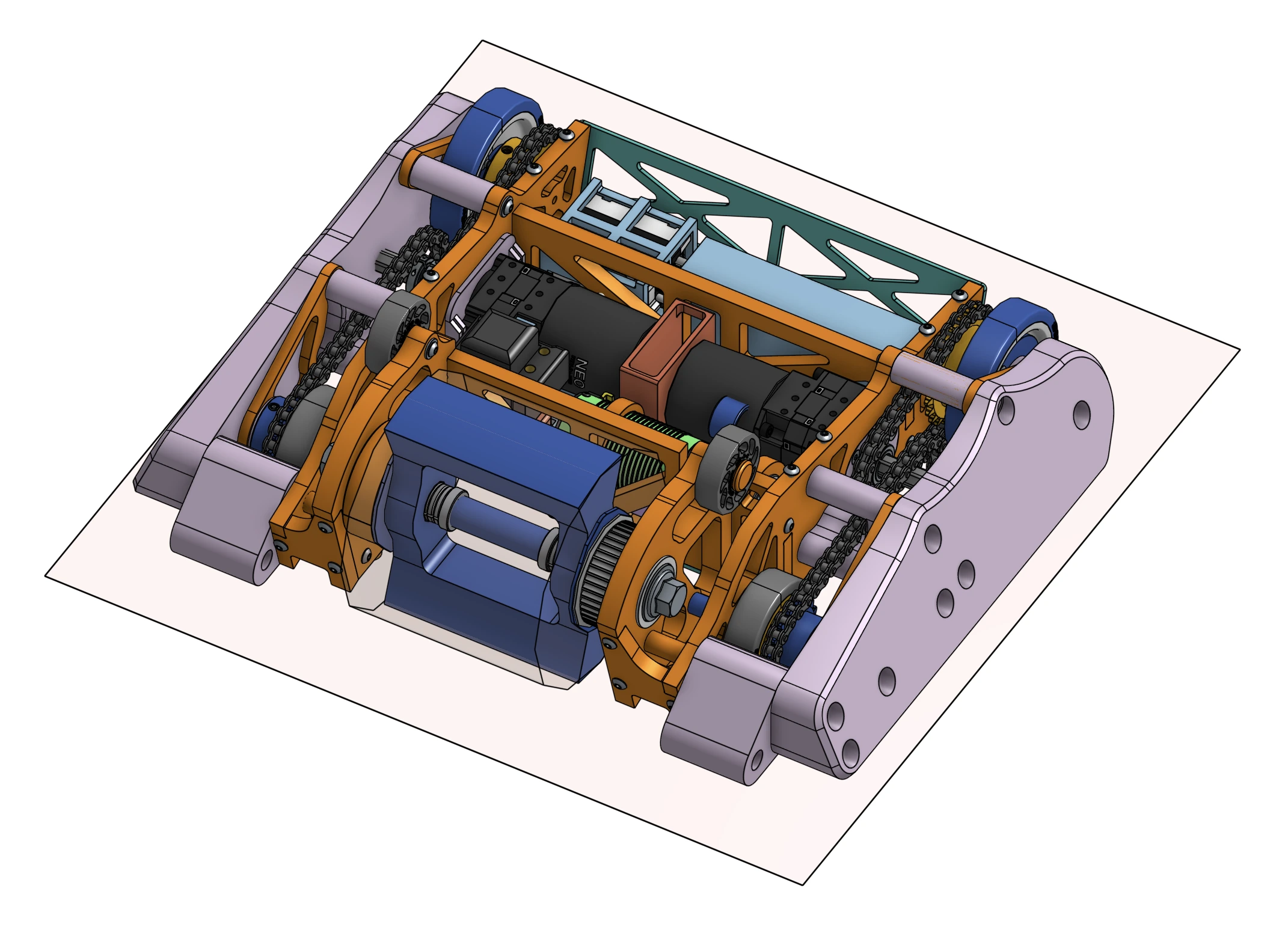
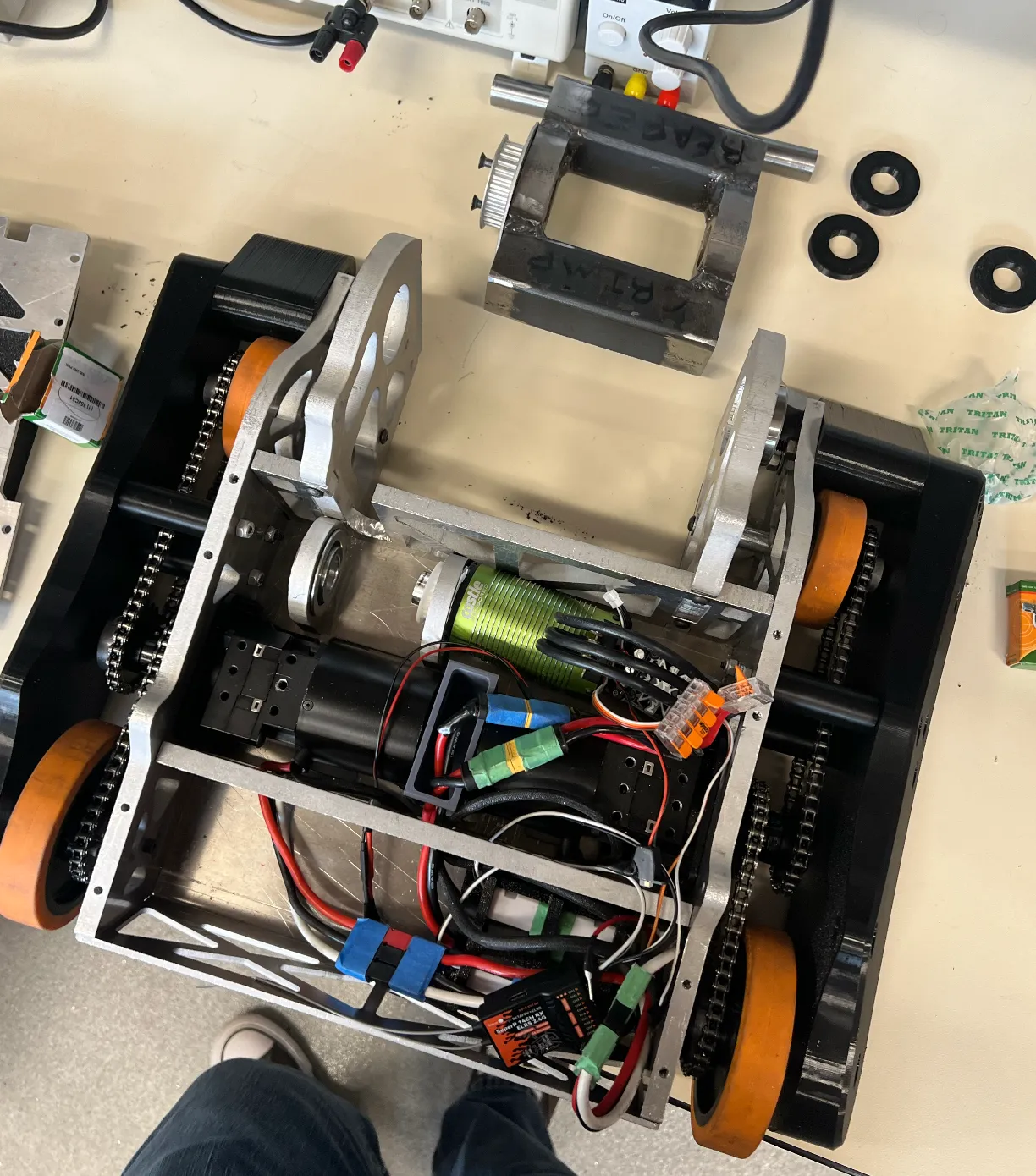
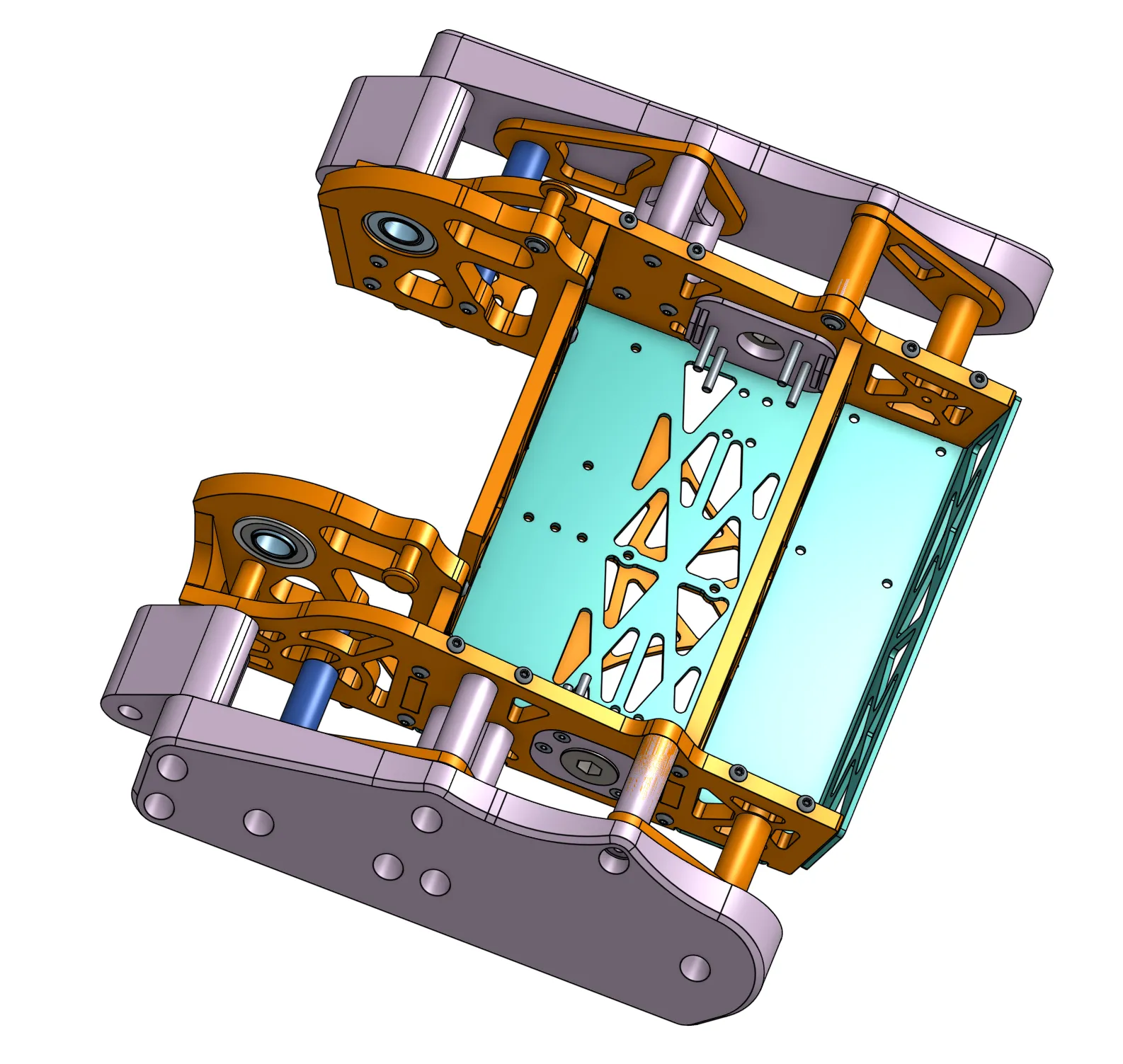
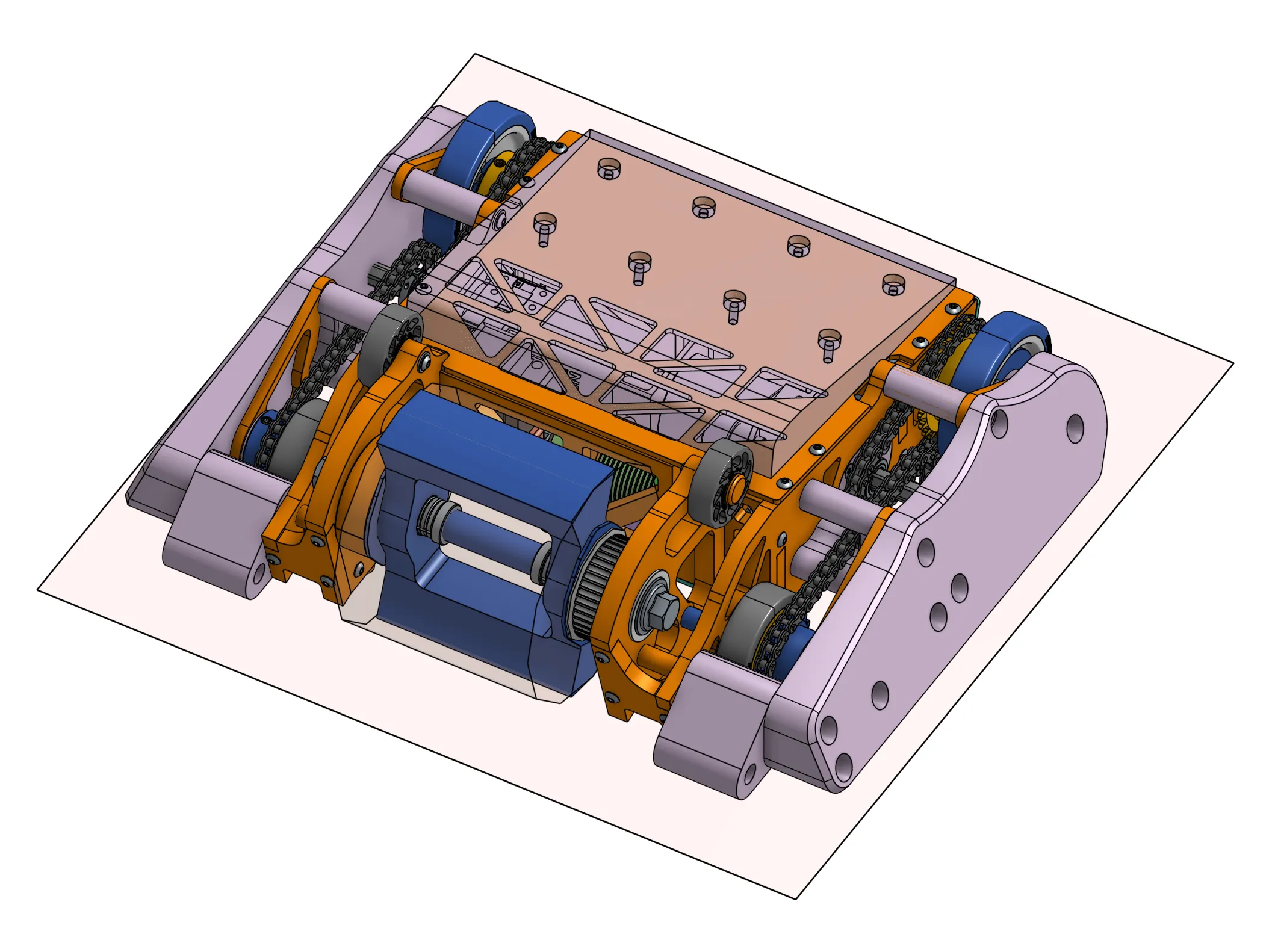
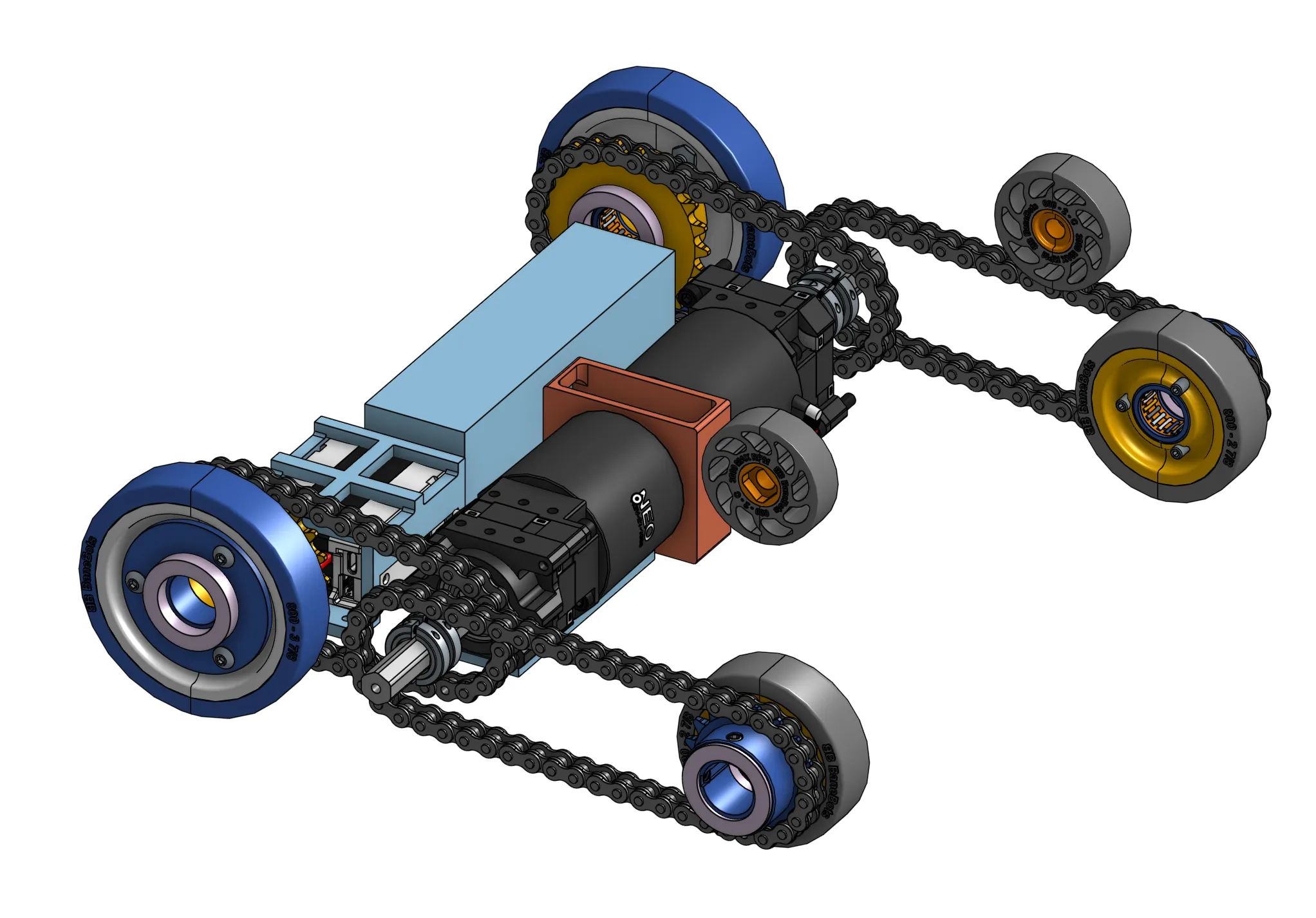
We were going for a similar form factor to Cowbot, though with more space in the inside for
wires, electronics, and other peripherals. We opted for a "tab and slot" approach for the chassis and used
the same hardware as Cowbot (2x NEO brushlesss motor and SPARKMAX ESCs) to reduce the cost of the project.
3/8" aluminum was chosen for the chassis as that was the available material the club had in stock. TPU was chosen for the
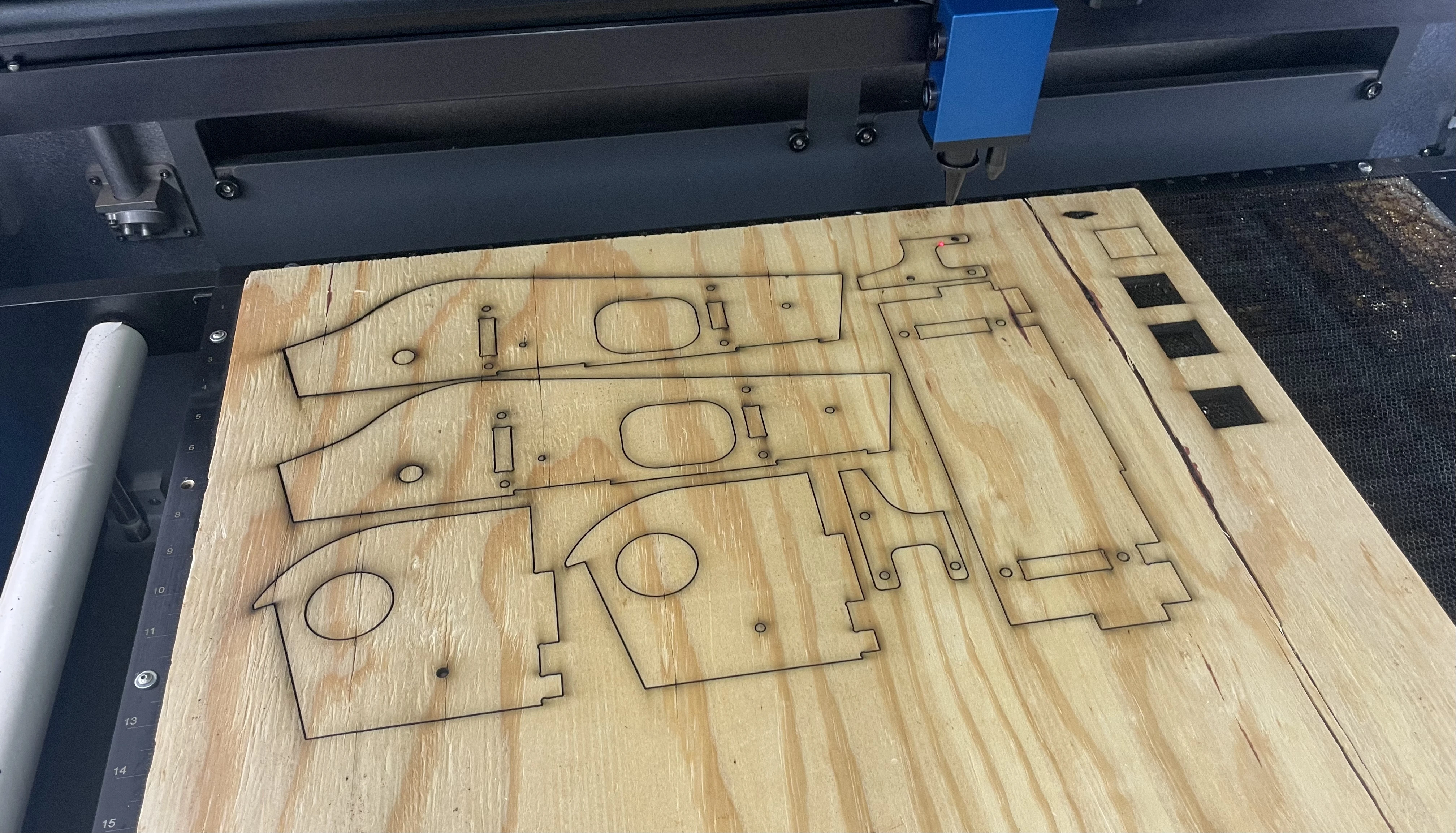
sideskirts to allow for a plastic deformation under impact, helping absorb and dissipate kinetic energy. We prototyped our chassis
by using laser cut wood of appropriate thicknesses to do test fits on our internal components.
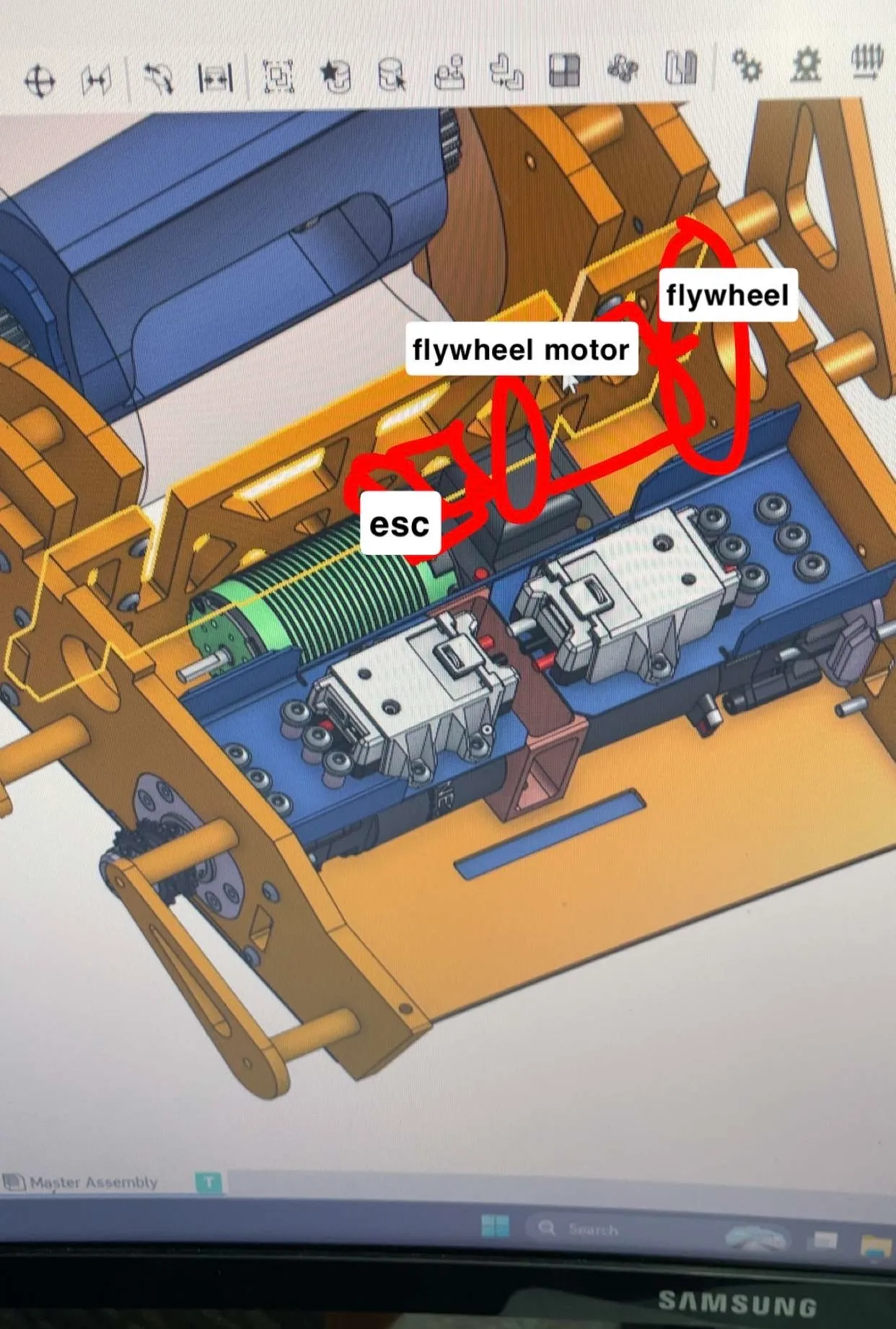
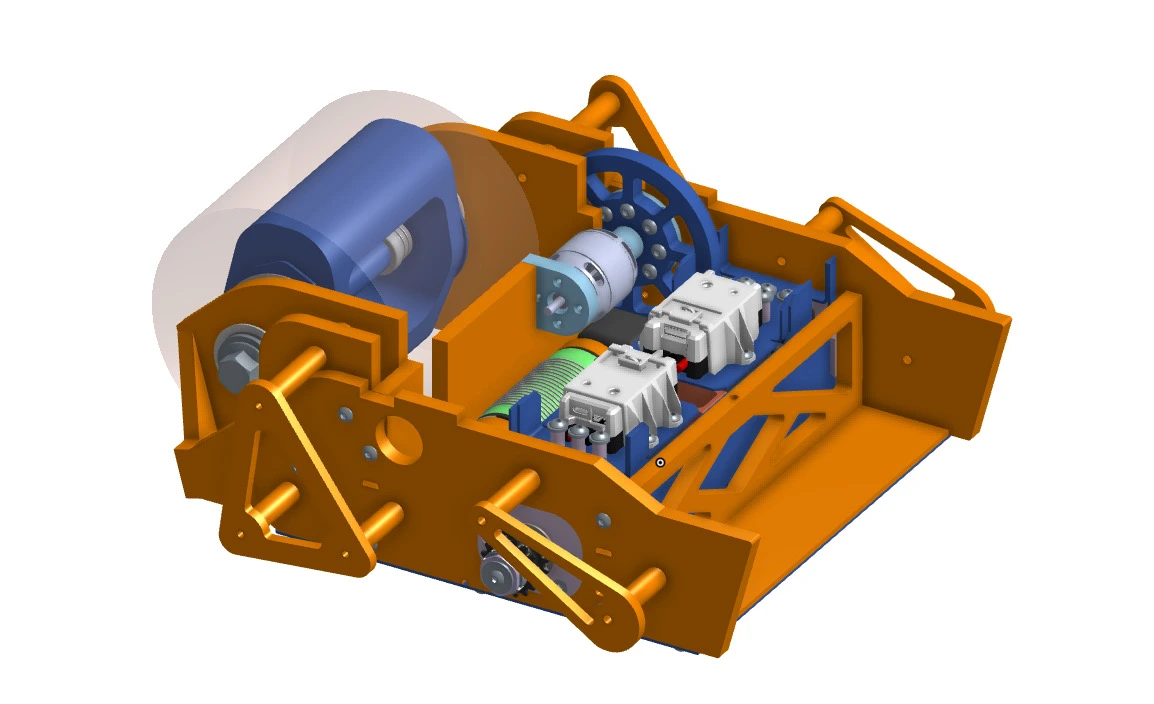
A new possibility we wanted to explore was the use of a counter-rotating flywheel with its own dedicated motor.
Because a vertical spinner generates significant angular momentum, it can introduce undesirable gyroscopic effects
during turning, maneuvering, or sudden changes in orientation. By spinning a separate flywheel in the opposite direction,
we aimed to partially offset these effects and improve the robot’s stability and controllability without changing the main
weapon system itself. We eventually rejected the component as it would introduce unnecessary points of failure for marginal gain.
We built our development workspace in Onshape, which allows multiple team members to simultaneously model on the same project files,
as all information is stored online in the cloud. Additionally, Onshape enables modeling through web browsers, opening up the ability
for our team to work on almost any platform, regardless of their hardware specifications. Onshape also provides publicly available
scripting tools for tasks such as weight reduction.