Before we started our design, we had to consider a few basic considerations in mind:
- The robot must comply with the 30 lb weight limit.
- The chassis should be rigid enough to withstand high impacts and carry loads from the spinning weapon.
- Materials must be relatively cheap and easily sourced (can't do titanium!).
- Electronics in the interior of the robot should be securedly fastened.
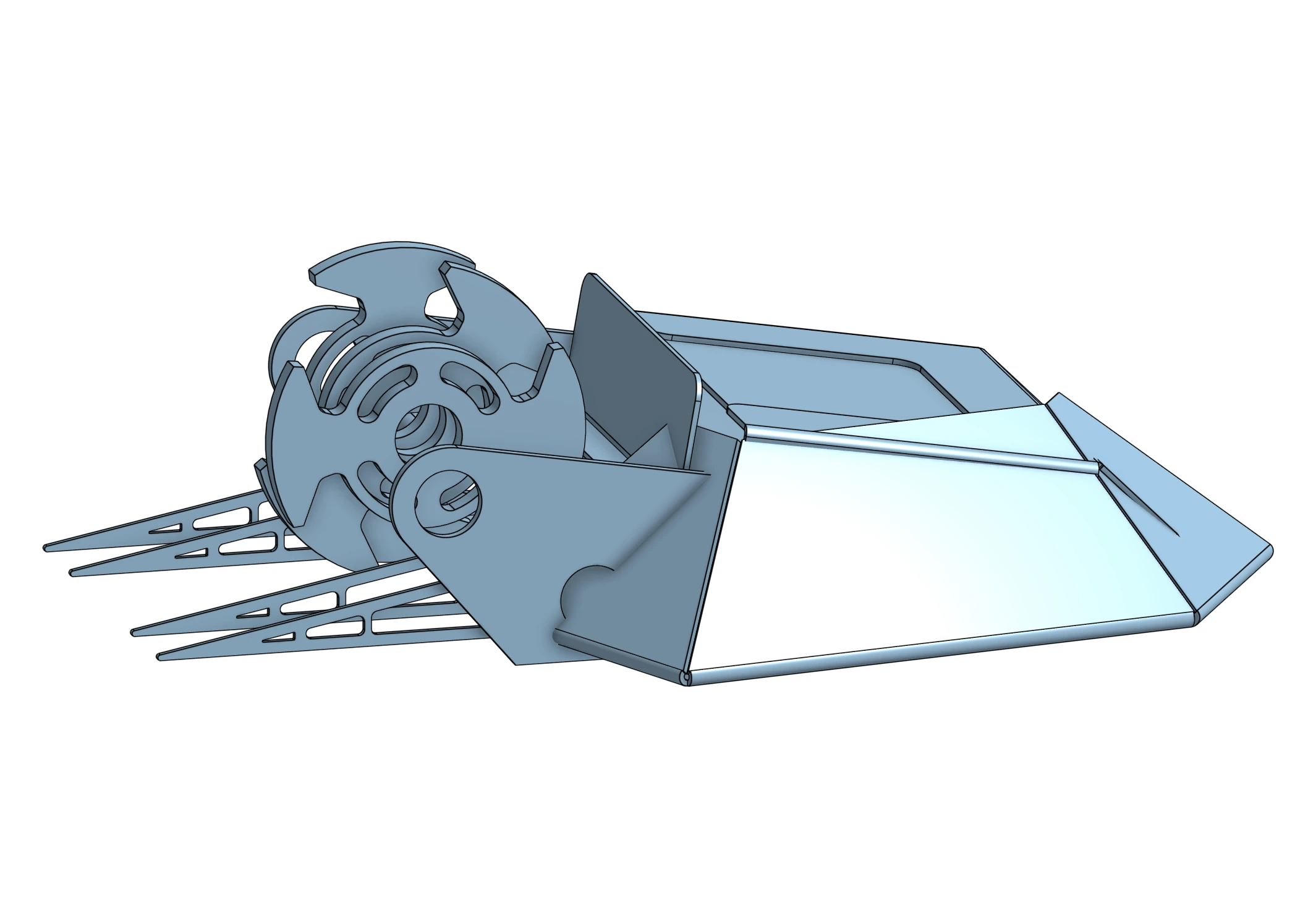
The initial basic idea we wanted for Cowbot was similar to sloped armor that Soviet tanks
from the second world war heavily employed. The idea is that an angled surface will have greater
effective thickness in the normal direction, perpendicular to the vehicle base. Additionally, we
theorized that loading multiple bends on one cut would be more efficient for manufacturing, and would
also eliminate the need for much fasteners. With this first draft, we were prioritizing the structural frame of the
robot before other critical aspects. Once we considered the spatial demands for a drivetrain, it was quickly realized
that the concept would be rather difficult to pull off effectively. Additionally, accounting for tolerances on an assembly
with that amount of bends, coupled with an inexperienced team, was probably not a good idea.
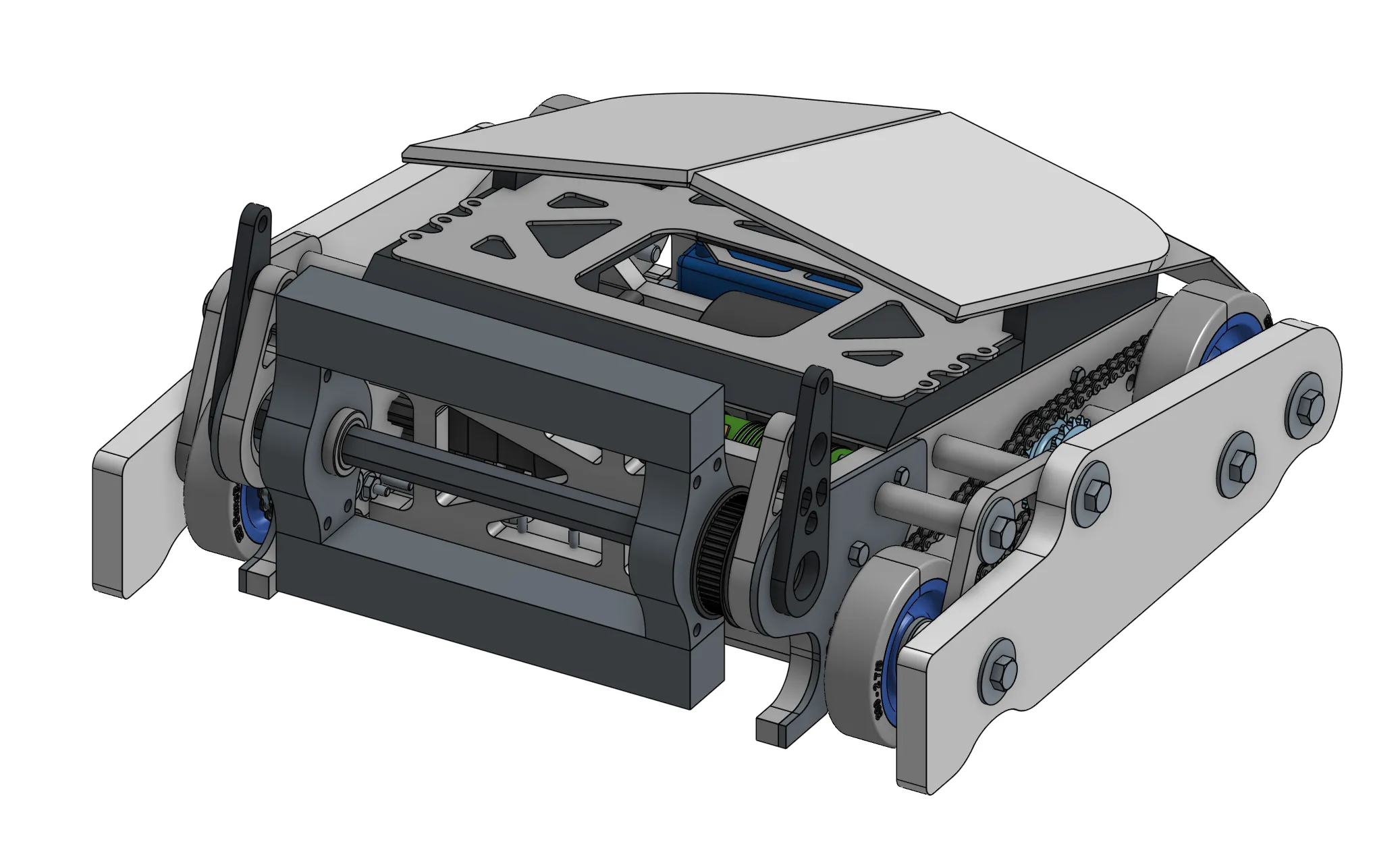
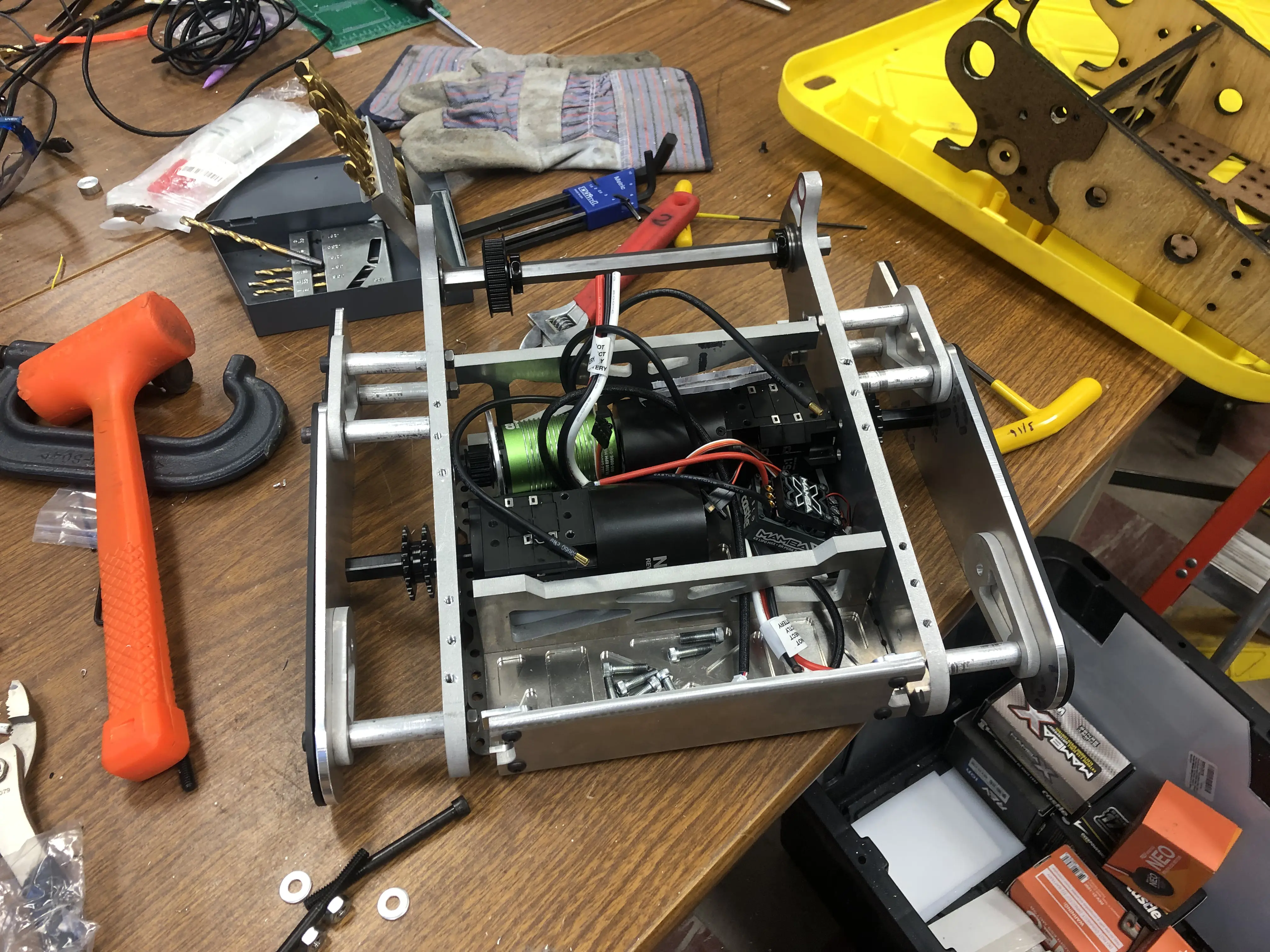
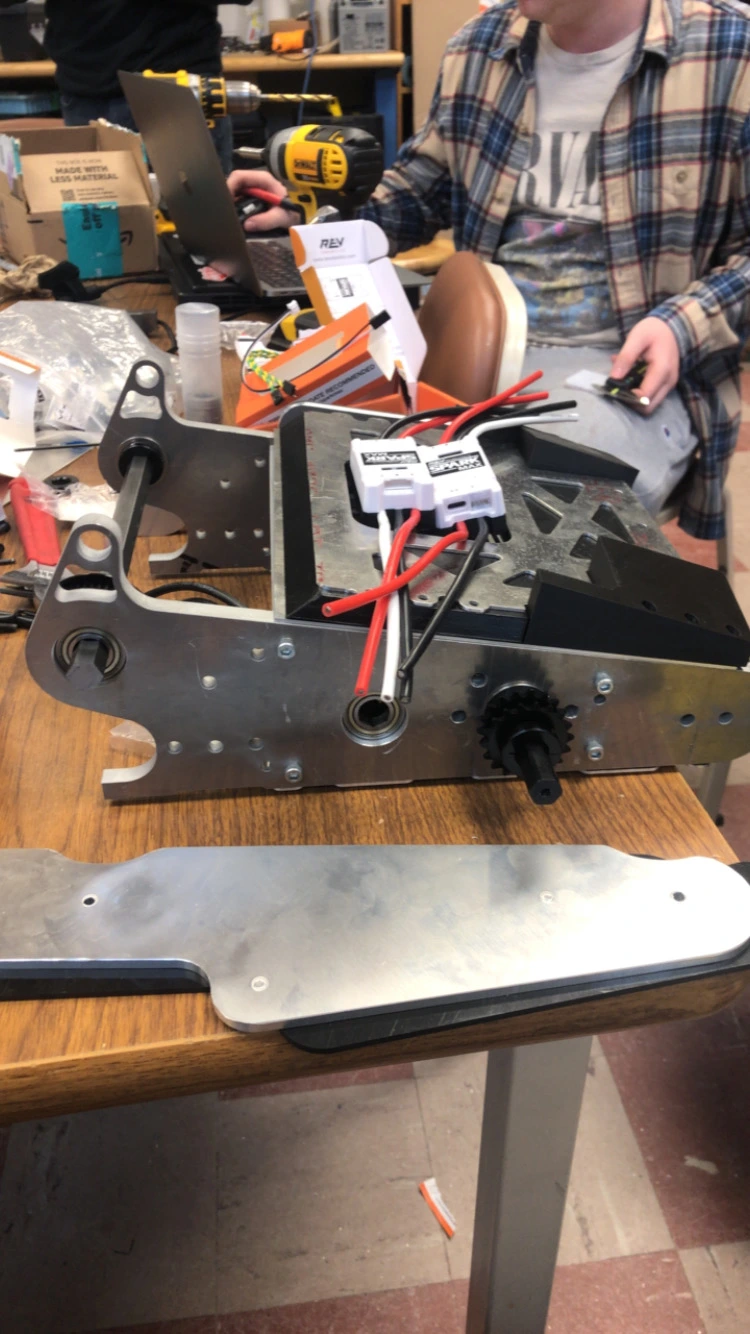
We settled on a "tab and slot" method for the chassis, which most other teams employed. For the drivetrain,
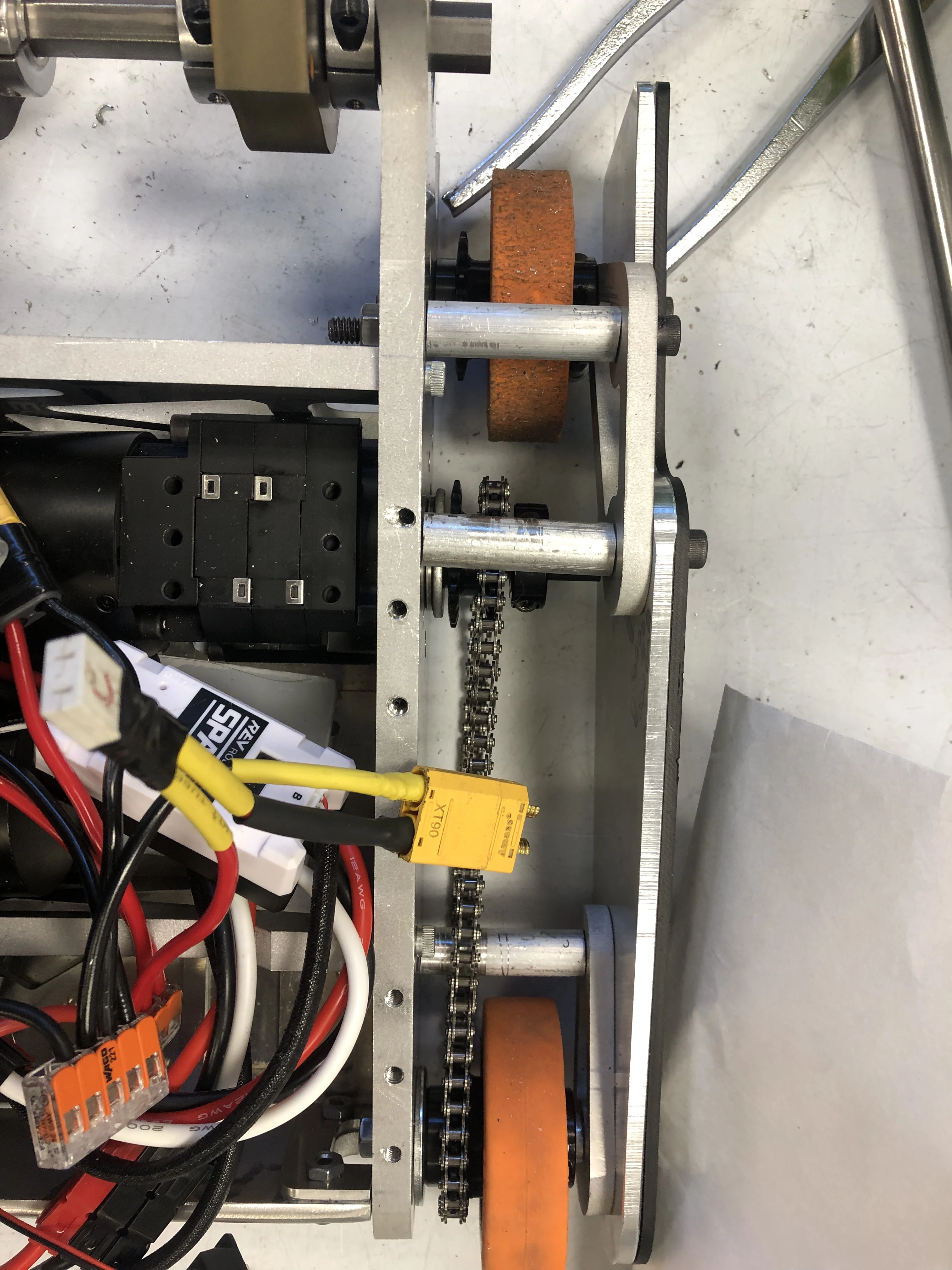
we elected to use the NEO brushless motor and planetary gearbox sets for their ease of use. Chain drive was selected
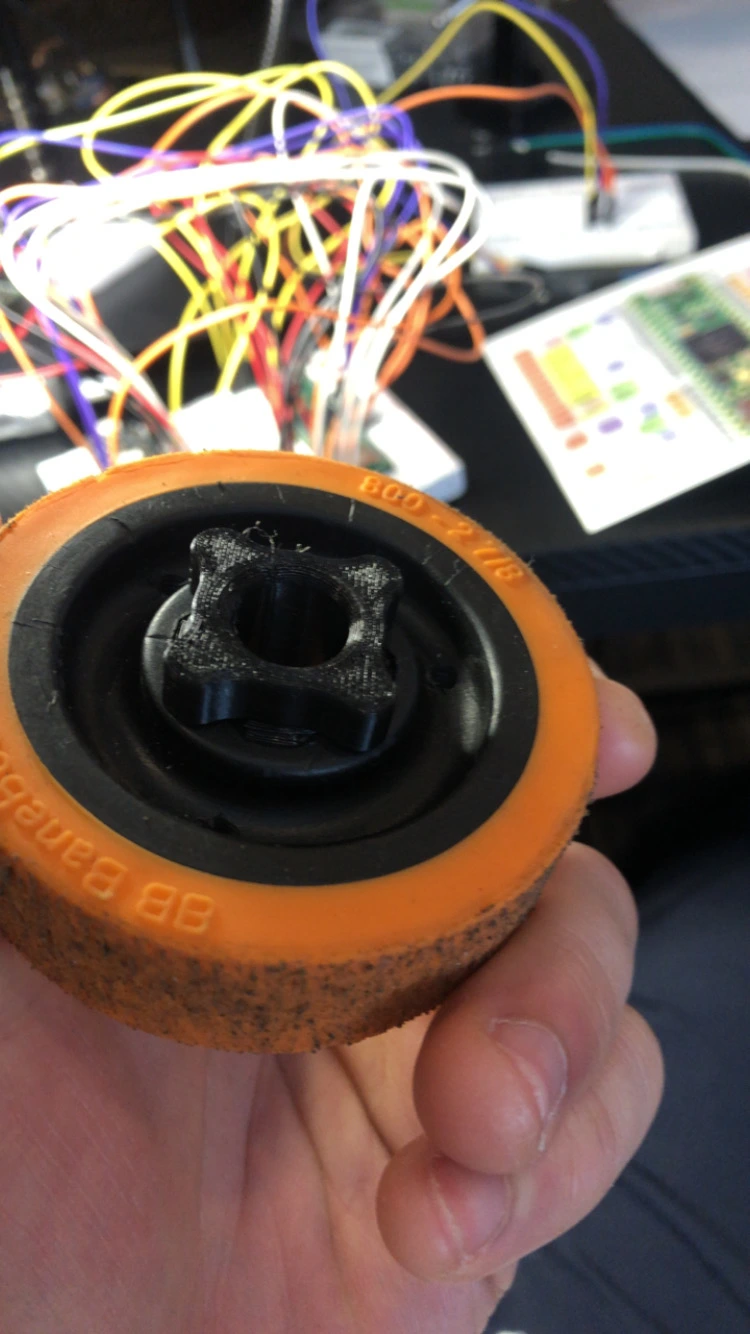
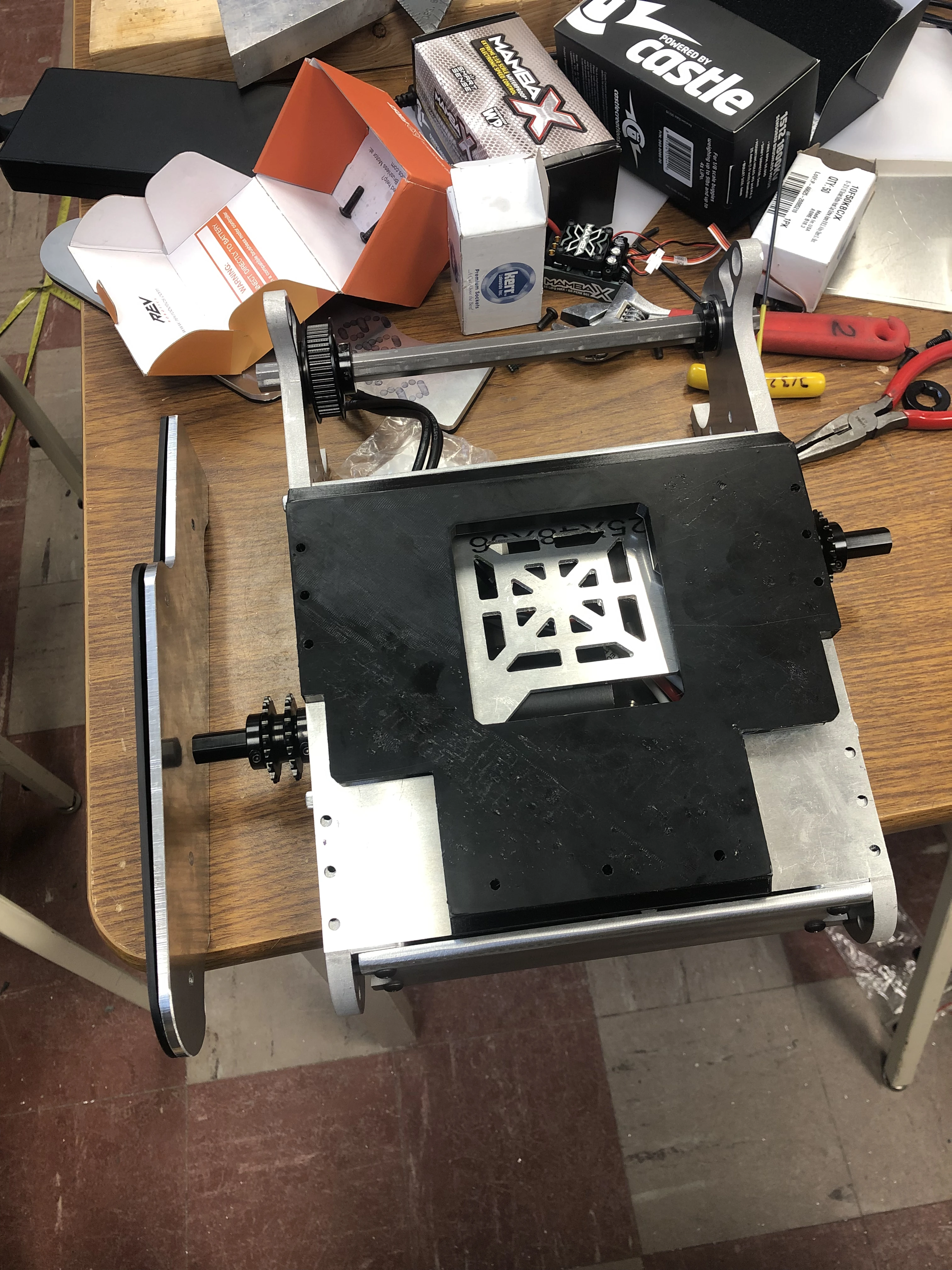
to circumvent frictional losses from a belt drive approach. For the weapon, a timing belt system was used to allow
for efficient mechanical transfer while allowing for slippage upon weapon impact. 3/8" aluminum was chosen for the chassis
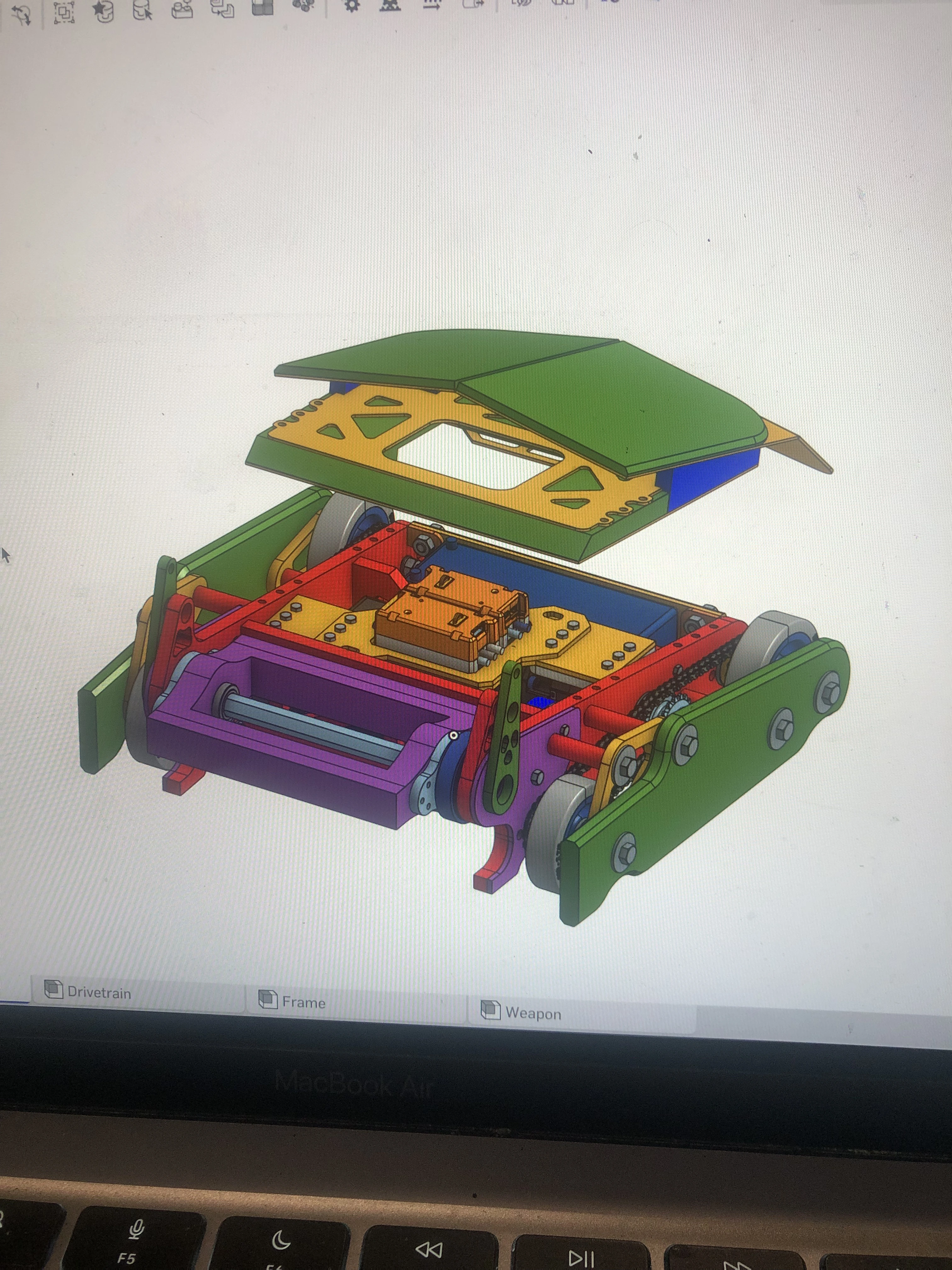
as that was the available thickness that the club had in stock. HDPE was selected for the side skirts because it can
plastically deform under impact rather than behave as a rigid member, helping absorb and dissipate kinetic energy.
A large cover consisting of aluminum and plastic sheets protect the top portion to defend from overhead attacks, largely from
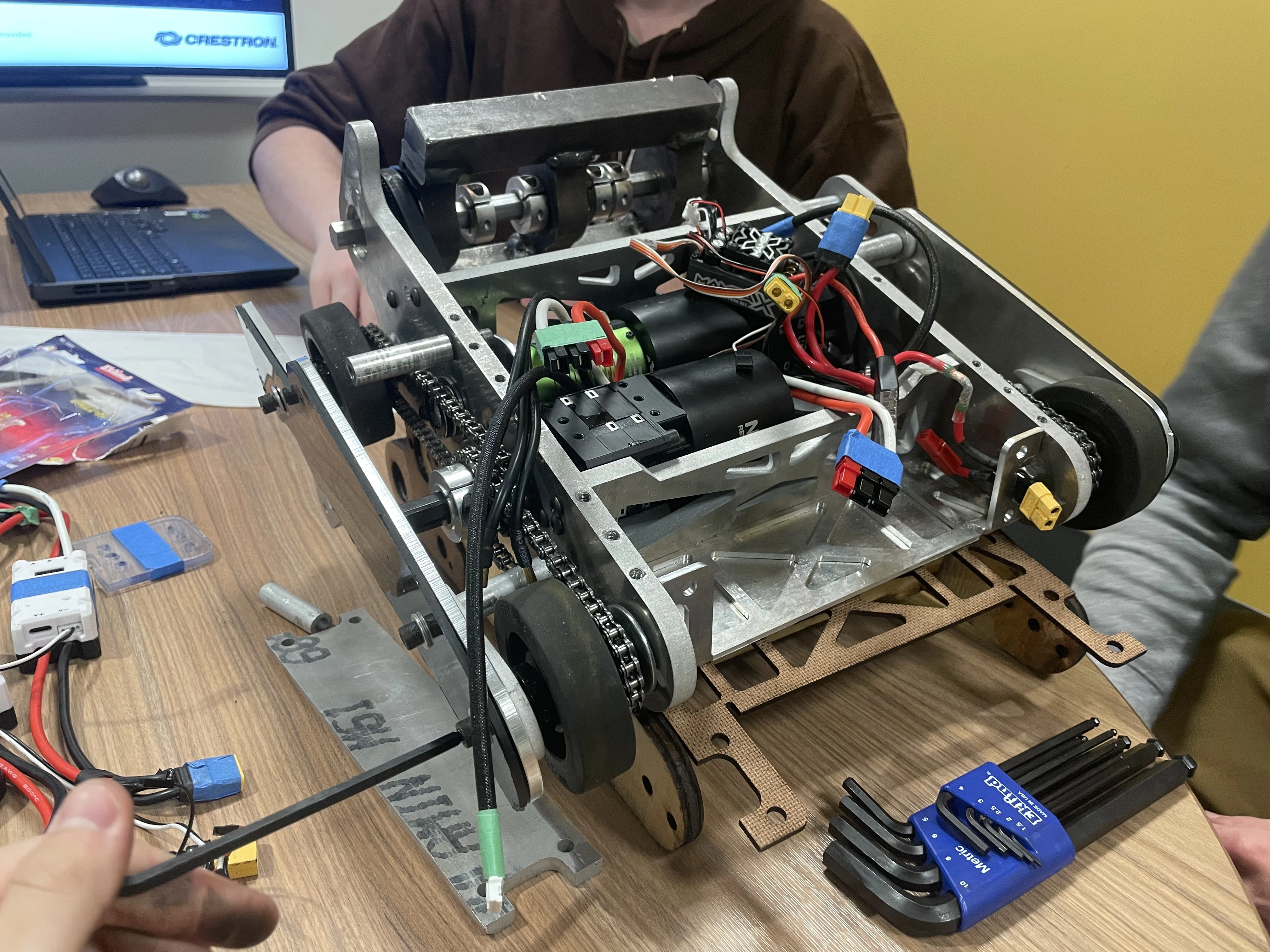
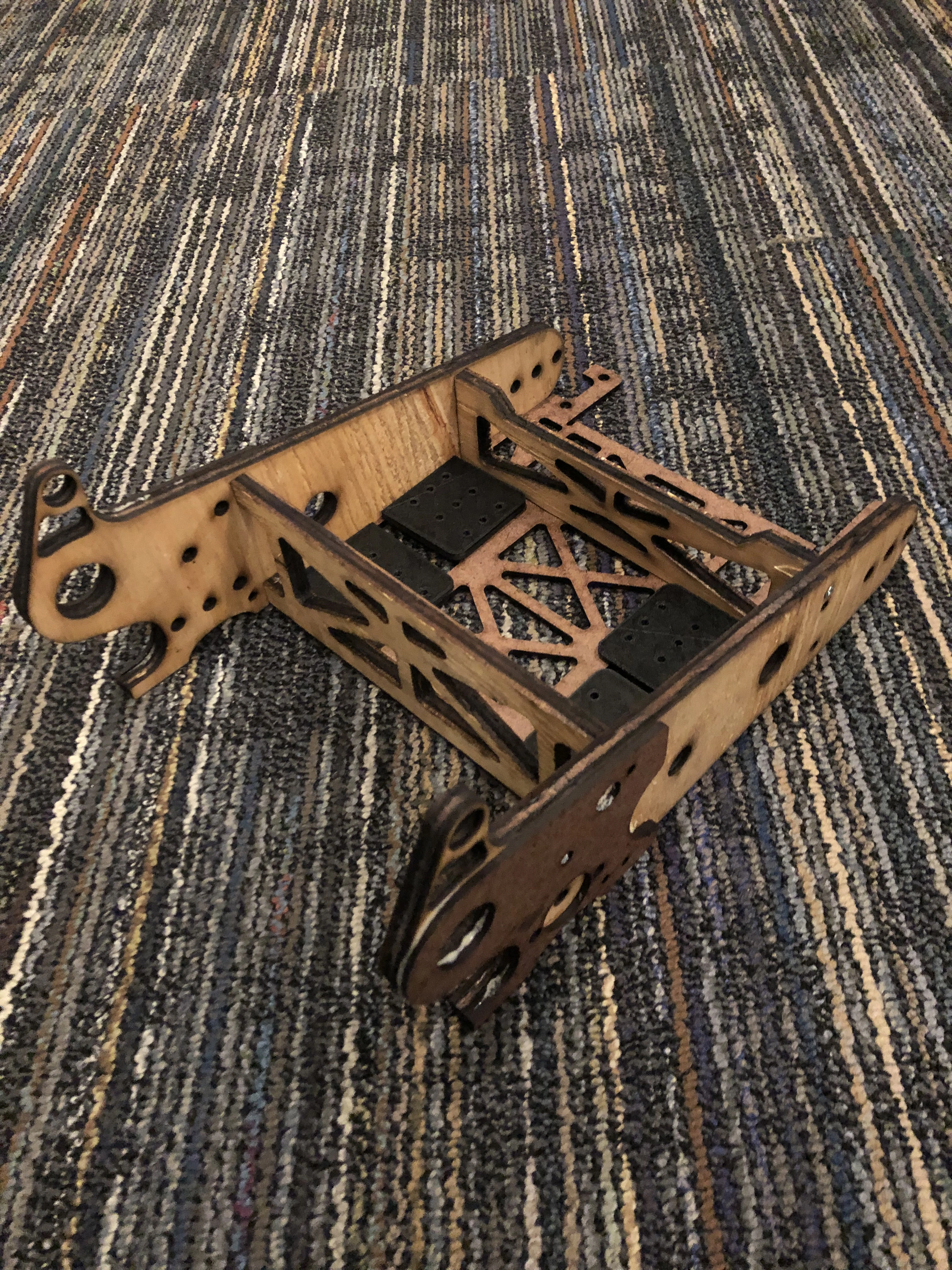
axe or hammer bots. We prototyped our chassis by using laser cut wood of appropriate thicknesses to do test fits on our internal
components.
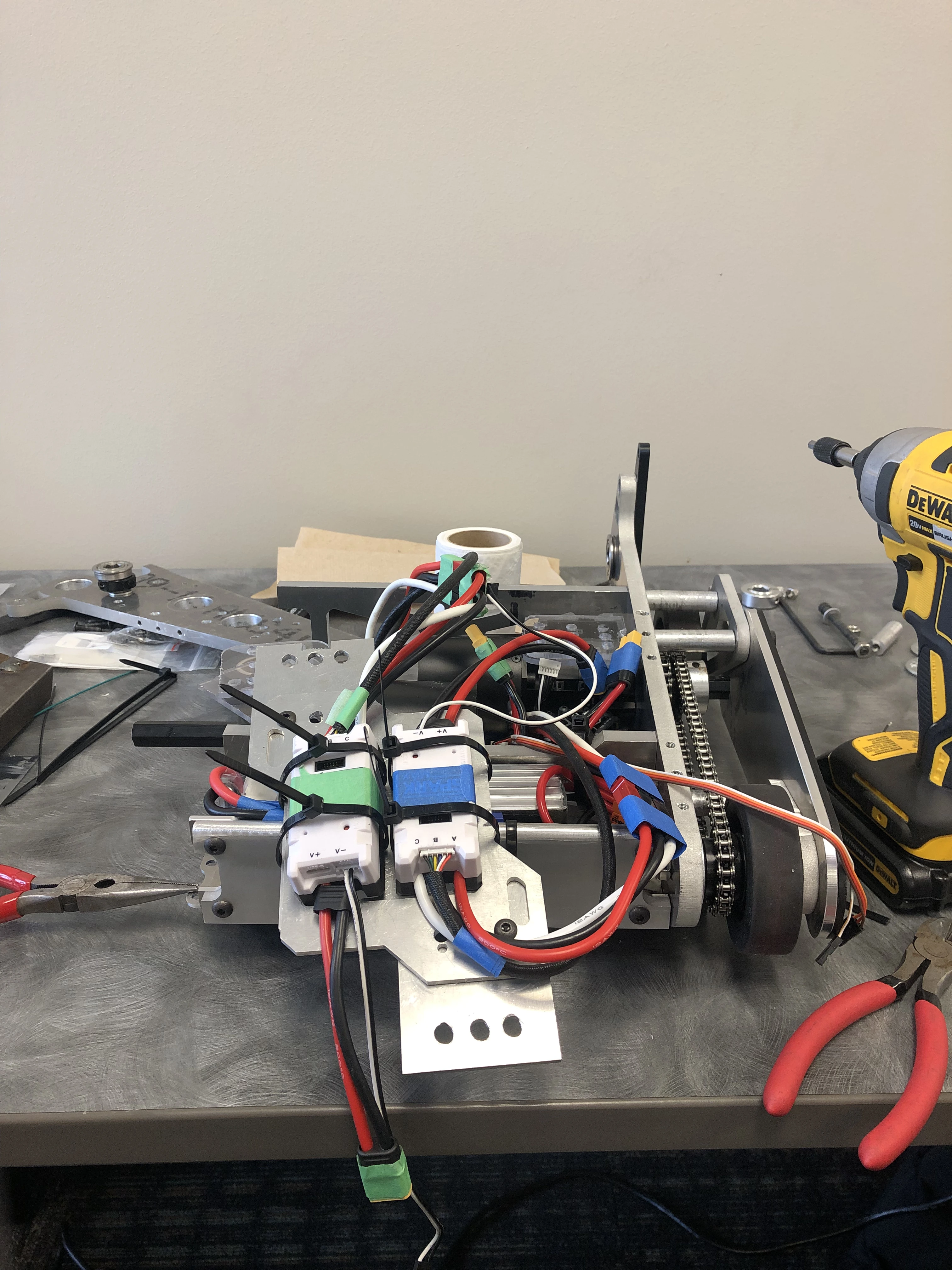
The internal volume was made to be as compact as possible. As a result, our drive motors were in a staggered configuration.
Our ground clearance was made to be as small as possible to prevent opposing vertical spinners from catching the undersdide
of the robot. One minor deviation we made from the rest of the club was that we switched from DSMX to ELRS for radio protocol,
which decreased our latency and increased our operational distance subtantially. While the impact on the overall project was
relatively small, the decision reflected a broader mindset that shaped the build - we were willing to evaluate assumptions,
compare alternatives, and adopt a different solution when it offered a clear technical advantage.
We built our development workspace in Onshape, which allows multiple team members to simultaneously model on the same project files,
as all information is stored online in the cloud. Additionally, Onshape enables modeling through web browsers, opening up the ability
for our team to work on almost any platform, regardless of their hardware specifications. Onshape also provides publicly available
scripting tools for tasks such as weight reduction.